



Gruppe Maschinensteuerung
Ringbeschleuniger bestehen aus einer Vielzahl von Einzelgeräten. Der Beschleuniger kann als Ganzes seine physikalische Funktion nur erfüllen, wenn die Aktivitäten der Geräte miteinander sinnvoll koordiniert werden. Dafür ist eine Software erforderlich, die unter Berücksichtigung der theoretischen Grundlagen der Beschleunigerphysik, der im Betrieb auftretenden realen Eigenschaften des Ionenstrahls sowie der technischen Eigenheiten der Geräte, zeitabhängige Sollwerte für alle Geräte berechnet. Darüber hinaus muss diese Software auch geeignete Bedienoberflächen für die Nutzer bereitstellen, mit deren Hilfe Änderungen an den Einstellungen des Beschleunigers zur Optimierung der Strahlparameter durchgeführt werden können.
Die Gruppe Maschinensteuerung in der Abteilung System Design SIS100/SIS18 widmet sich der Entwicklung von Softwaresystemen für die Steuerung der Beschleuniger der FAIR-Anlage.
Ihre Mitglieder, die aus Physikerinnen und Physikern, sowie zwei Ingenieuren bestehen, verfügen zusammen über ein tiefgreifendes Verständnis von Beschleunigerphysik, umfangreiche Erfahrung mit dem Betrieb von Beschleunigern und langjährige Erfahrung in der Entwicklung von Software zur Maschinensteuerung. Sie sind darüber hinaus mit Funktionsweise und Schnittstellen sowohl der technischen Geräte als auch des Kontrollsystems vertraut. Die Gruppe pflegt einen intensiven Austausch mit den für die Geräte und das Kontrollsystem verantwortlichen technischen Fachgruppen und dem Betrieb.
Für die Steuerung von Ringbeschleunigern erweist sich die enge Verzahnung der Gruppe Maschinensteuerung mit der Gruppe Systemplanung als äußerst sinnvoll. Um Konzepte zur Steuerung von Beschleunigern entwickeln zu können, müssen häufig strahldynamische Simulationen durchgeführt werden.
Die Mitarbeiter der Gruppe Systemplanung tragen mit ihrer fachlichen Kompetenz auf diesem Gebiet wesentlich dazu bei. Andererseits unterstützt die Maschinensteuerung auch die Systemplanung, etwa bei der Vorbereitung und Durchführung von Maschinenexperimenten zur Weiterentwicklung der Beschleuniger.
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Was versteht man unter Maschinensteuerung?
Die Funktion eines Ringbeschleunigers wird durch physikalische Parameter beschrieben. Dazu zählen die grundlegenden Strahleigenschaften- Ionensorte, Energie, Intensität, Emittanzen, Eigenschaften des Beschleunigers- Arbeitspunkt, ionenoptische Funktionen, Steilheit der Beschleunigungsrampe, sowie Informationen über die Art und Weise der Injektion des Strahls in die Maschine hinein und der Extraktion des Strahls aus der Maschine heraus. Demgegenüber ist die Arbeitsweise der Geräte, die den Strahl in der gewünschten Weise beeinflussen sollen, durch die Vorgabe technischer Parameter bestimmt. So werden die Magnete des Beschleunigers durch Netzgeräte betrieben, deren Aktivität durch den zeitlichen Verlauf des Stroms in den angeschlossenen Magneten definiert ist. Für den Betrieb einer HF-Kavität müssen wiederum Gap-Spannung und Frequenz, als Funktion der Zeit vorgegeben werden.
Eine der beiden zentralen Aufgaben der Maschinensteuerung besteht darin, die Werte für die physikalischen Parameter der Maschine in konsistente Vorgaben für den zeitlichen Verlauf der technischen Parameter aller Geräte, sogenannte Sollwerte, zu übersetzen, damit die Geräte synchron auf den Strahl in der gewünschten Weise einwirken. Diese Übersetzung erfordert ein Maschinenmodell, dessen Eingabeparameter die physikalischen Parameter des Beschleunigers und dessen Ausgabeparameter die Sollwerte aller Geräte sind. Zur Berechnung der Geräte-Sollwerte aus den physikalischen Parametern werden einerseits beschleunigerphysikalische Zusammenhänge unter Verwendung der spezifischen ionenoptischen Eigenschaften des Beschleunigers herangezogen, andererseits aber auch gerätespezifische Daten verarbeitet, wie etwa die Erregungskurven der Magnete.
Da die Geräte des Beschleunigers in der Realität immer unvermeidbare Abweichungen von ihrem idealisierten Verhalten in den theoretischen Modellen zeigen, enthält jeder Beschleuniger Korrekturelemente, die zur Verringerung der Abweichungen vom idealen Verhalten eingesetzt werden. Das Maschinenmodell stellt daher neben den physikalischen Parametern, welche die Funktion des Beschleunigers beschreiben, auch physikalische Parameter für die Verwendung der Korrekturelemente zur Korrektur von erwarteten Abweichungen zur Verfügung.
Allerdings sind die Abweichungen in der realen Maschine nur begrenzt vorhersehbar. In die Entwicklung des Maschinenmodells fließen zwar Erfahrungen mit dem Betrieb von Beschleunigern ein, doch gibt es in der Praxis immer Abweichungen, die sich mit den Parametern des Modells nicht zufriedenstellend korrigieren lassen. Ob der Strahl die geforderten Eigenschaften hat, wird an Beschleunigern mit den Messinstrumenten der Strahldiagnose überprüft. Wenn die Messungen Abweichungen vom gewünschten Verhalten anzeigen, können daraus unter Verwendung beschleunigerphysikalischer Zusammenhänge Korrekturwerte für Geräte berechnet werden, die geeignet sind, die Abweichungen zu minimieren. Diese zweite zentrale Aufgabe der Maschinensteuerung übernehmen Systeme zur strahlbasierten Messung und Regelung.
Maschinenmodellierung
Die Maschinenmodelle für die FAIR-Anlage werden unter Verwendung des LSA-Frameworks (LHC Software Architecture) realisiert. Dieses Framework wurde ursprünglich am CERN für die Steuerung des LHC eingeführt. Es besteht im Kern aus einer Datenbank, einem Dienstprogramm (dem LSA-Server) und einer Reihe von Applikationen. In der Datenbank werden alle für die Berechnung der Sollwerte erforderlichen Informationen, wie Geräte-Eigenschaften und ionenoptische Daten, zur Verfügung gestellt. Darüber hinaus enthält sie Strukturen für die Modellierung der Beschleuniger. Schließlich werden auch alle berechneten Werte dort abgelegt. Im LSA-Server werden alle Berechnungen durchgeführt, welche aus den Eingabe-Parametern des Modells sowohl Zwischenwerte als auch die Geräte-Sollwerte ableiten. Die verschiedenen Applikationen erlauben den Zugriff auf die Daten in der LSA-Datenbank sowie die Durchführung von Änderungen an den Eingabewerten.
Parameter und Hierarchien
Eines der zentralen Elemente für die Modellierung mit LSA ist die Hierarchie von Parametern, mit denen die Abhängigkeiten der einzelnen physikalischen und technischen Größen voneinander explizit abgebildet werden. In der obersten Ebene dieser Hierarchie stehen die physikalischen Eingabeparameter, mit denen die Maschine gesteuert werden soll. Am unteren Ende befinden sich die Sollwerte einzelner Geräte. In Zwischenebenen können weitere Parameter definiert werden, zum Beispiel um die Werte physikalischer Zwischengrößen bereitzustellen, die für die Auswertung von Messdaten benötigt werden, oder um die Berechnung nachgelagerter Parameter zu vereinfachen. Die Verbindungen eines Parameters nach oben geben an, welche Elternparameter zur Berechnung erforderlich sind. Damit geht aus der Parameterhierachie eindeutig hervor, auf welche Werte die Änderung eines bestimmten Parameters Auswirkung hat und welche Parameter zu Änderungen an einem bestimmten Parameter führen können. Während die technischen Parameter, die den Sollwerten der Geräte entsprechen, durch die Auslegung des Beschleunigers vorgegeben sind, werden alle anderen Parameter bis hin zu den physikalischen Eingabeparametern von den Modellierern frei definiert.
 in Strom- und Spannungskurven für die Quadrupol-Netzgeräte")
Regeln (Rules)
Um die Werte von Parametern aus den Werten ihrer Elternparameter berechnen zu können, werden in LSA Regeln (Rules) hinterlegt. Diese Regeln bilden die Algorithmen zur Berechnung von abhängigen Parametern in Java-Code ab. An dieser Stelle wird insbesondere die beschleunigerphysikalische Theorie in konkrete Vorschriften zur Berechnung übersetzt. Die Implementierung der Regeln ist daher eine der wichtigsten Aufgaben der Modellierer.


Daten (Optiken, Gerätedaten etc.)
Hierarchie und Regeln für Ringbeschleuniger können aufgrund der fundamentalen Ähnlichkeit ihrer Funktionsweise weitgehend generisch gestaltet werden, so dass derselbe Code für die Berechnung an allen Ringbeschleunigern verwendet werden kann. Diese Vorgehensweise verringert den Aufwand für Implementierung und Wartung erheblich und wird daher bei der Modellierung der Beschleuniger von GSI und FAIR wo immer möglich angewendet. Andererseits unterscheiden sich die einzelnen Beschleuniger natürlich in vielen Punkten, etwa in den konkreten Eigenschaften funktionell vergleichbarer Komponenten- bspw. Anzahl und Erregungskurven der Quadrupole, sowie Limits der zugehörigen Netzgeräte, aber auch in der ionenoptischen Auslegung und in den Startwerten für die Eingabeparameter. Um diese Unterschiede zu berücksichtigen, enthält die LSA-Datenbank spezifische Daten aller Geräte sowie maschinenspezifische Daten zu Ionenoptik und Startwerten. Die maschinenspezifischen Daten werden dabei von Experten für den jeweiligen Beschleuniger geliefert. Für SIS18 und SIS100 erfüllen die Mitglieder der Gruppe Systemplanung diese Aufgabe.
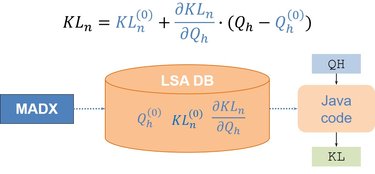
Für die Berechnung der Änderung der Sollwerte für die Quadrupol-Netzgeräte bei Änderungen der Eingabeparameter für die Tunes, müssen Koeffizienten für eine lineare Interpolation mit Hilfe ionenoptischer Simulationen generiert und in die LSA-Datenbank importiert werden.
Abbildung von Zyklen (Contexts)
Zur Beschreibung von Zyklen in Ringbeschleunigern stellt LSA das Konzept des Beam Process zur Verfügung. Ein Beam Process bildet einen Teilabschnitt des Zyklus mit einer eigenständigen Funktion ab, wie etwa Injektion, Beschleunigungsrampe oder Extraktion. Ein Zyklus besteht dann aus einer Abfolge von Beam Processes, die in LSA als sogenannte Chain dargestellt wird.

Einstellungen (Settings)
Parameter, Hierarchie und Regeln stellen, zusammen mit den Daten in der LSA-Datenbank, die Grundlage zur Berechnung von Werten dar. Die Werte selbst sind in LSA als sogenannte Settings manifestiert. Ein Setting verknüpft einen Wert mit einem Parameter und einem Beam Process. Der Wert eines Parameters liegt in LSA also aufgeteilt im Beam Process vor. Auch die Sollwerte der Geräte, die beim Einrichten des Zyklus und anschließend bei jeder Änderung automatisch an die Geräte geschickt werden, sind im Beam Process unterteilt. Es ist Aufgabe des Timingsystems, die Ausführung der Daten in der richtigen zeitlichen Abfolge durch Verteilung von Events in der gesamten Beschleunigeranlage zu veranlassen. Dafür enthält das Modell entsprechende Regeln und Parameter für die Berechnung von Solldaten für das Timingsystem.

Benutzeroberfläche
Die Berechnungen der Sollwerte unter Verwendung der oben beschriebenen Strukturen erfolgt auf dem LSA-Server. Dieser erlaubt als Dienstprogramm keinen direkten Zugriff durch die Benutzer. Es muss daher Benutzeroberflächen geben, mit denen die Benutzer die Werte des Modells darstellen und manipulieren können. Eine der wichtigsten Benutzeroberflächen ist die Applikation ParamModi, welche den effizienten Zugriff auf alle Eingabeparameter des Modells ermöglicht und darüber hinaus die Visualisierung der Gerätesollwerte, etwa die zeitabhängigen Stromwerte eines Netzgerätes, ermöglicht. Die Auswahl und Anordnung der Eingabeparameter auf der Oberfläche wird dabei von den Modellierern in Absprache mit den Maschinenexperten und den Operateuren definiert.
Die Architektur von LSA erlaubt darüber hinaus die Entwicklung zusätzlicher Bedienprogramme für spezielle Einstell- und Optimierungsaufgaben. Solche Programme verwenden die gleiche Schnittstelle zum LSA-Server wie ParamModi, um Werte im Modell zu verändern, können aber beispielsweise gemessene Strahleigenschaften verwenden, um daraus optimierte neue Werte zu berechnen. Solche strahlbasierten Applikationen werden ebenfalls in der Gruppe Steuerung entwickelt.
